 センサー系の誕生
センサー系の誕生
語り手:宇井 恭一(うい・きょういち)
● センサー系
キューブサットをどういう衛星にするかという話をしていたとき、やはり重要なのは、基本的な衛星バス実証だろうということになりました。キューブサットのような小さな衛星は、まだ誰も一度も作ったことがなかったですし、衛星を作るだなんて、自分たちにとっても初めての経験でしたから、まずは基礎的なところからおさえようということになりました。
今回のキューブサット一個を作って終わりという気持ちはなかったので、将来につながる衛星技術の獲得を考えたミッションをやろうということになっていました。パドル展開にしたのもその一端ですが、地味でも先の技術開発につながるものを、ということで知恵を絞りました。
個人的に、将来的には衛星の姿勢制御をしたいと思っていました。この点については、メンバーの中でコンセンサスがとれていました。もともと、ウチの研究室は、衛星の動力学(軌道上でどう物体が動くか)を研究しているところなので、このあたりは、ほとんど異論なく決まったと思います。
ただ、キューブサットの大きさで、姿勢制御をするのは難しかったので、まずは、姿勢を検知できるセンサー(ジャイロ、加速度計、太陽センサなど)を載せて、データをちゃんと取って、解析をしようという、地味な路線でいくことになりました。ただ、専門家からは、「センサーは、ミッションによって変わるもので、姿勢制御をしない衛星に、姿勢制御センサーを載せても意味はないのではないか」という厳しいご指摘も頂くことになりました。しかし、CanSatレベルでもジャイロや加速度の値を用いた運動解析はしっかり行っていなかったので、地上での解析も含めたセンサー解析のノウハウを得ることは重要だとチーム内で確信し、開発を進めることにしました。
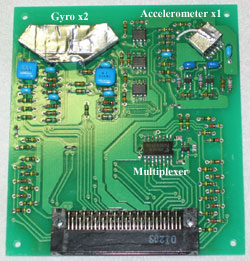
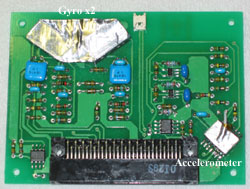
センサー基板
センサー系は宇井、前田、居相でチームを組んでスタートしました。当初、センサー系と呼んで、温度センサーからジャイロセンサーまで、計測するものはすべて担当しました。途中で、熱解析の部分で山口に分離して、姿勢解析は宇井と居相、キャリブレーションは宇井、柏、山口で行いました。

● センサー苦労話
センサーは、地味で苦労が多いところだというのが、自分の印象です。誤解されると困るんですが、おもしろくないというわけじゃないですよ。面白みはもちろんあります。また、衛星のシステムには直接関係しませんから、打ち上げ直後のプレッシャーは他の担当者よりは、きつくないかもしれません。代わりに、衛星が打ちあがる前より、打ちあがってからのほうが、仕事量が多いんです。
当時の東工大チームは、とにかく個性豊かというか、「あまりにそのポジションにはまっていて、動かしようがない」人が多かったんです。最初は、各人が数グループを兼任する形で開発をすすめていたんですが、それぞれが大変になってくると、一人一人が、深く深くのめりこむようになっていきました。そして、それぞれが担当の系のものを作り上げるんです。他の誰もがその役割は絶対に担えないんじゃないかというくらいの鬼気迫るスポットが、たくさんあったという感じでした。構造・機構は澤田、OBCは中谷、通信は岡田、電源は宮下、というように、ものすごく個性が強いメンバーがいて、それをまとめるプロマネに此上、という感じで、もうどれも動かしようがありませんでしたね。自分は、どれかが突出しているというタイプではなく、姿勢系に興味があって、回路が得意な居相の助力の下、センサー開発を進めたという感じでした。
最初、三人でやっていたセンサー系でしたが、居相がイランに留学することになり、前田が就職することになり、自分が一人でやらないといけなくなりました。回路を作るのが天才的に上手だった居相がいなくなって、けっこう大変になりましたが、代わりに新メンバーの柏、山口が参加するということになりました。
● 測るということ
センサは計測した結果を電圧値で出力します。例えば、10℃のとき1.0V、20℃のとき2.0Vというようにです。衛星のコンピュータはこの3.0Vとか1.0Vとかを正確に取得する必要がありますが、そのためにA/Dコンバーターというものを用います。キュートでは、3.08V「基準」として、それを256分割して、キュートのコンピュータが判断します。例えば、2.0Vであれば、2.0V/3.08V≒166という値としてコンピュータは取得します。地上では、166という値のみ送られてきて、その値から166/256×3.08≒1.99Vというように変換して電圧値を知ることができるわけです。センサ系では、正確に計測しなければならないので、この「基準(3.08V)」という値が非常に重要になり、キュートでは定電圧素子という素子を用いるなどかなりデリケートに扱いました。
また、より正確に測れるようにするには、センシングノウハウを高めて、センサーが故障していないかどうかを判断することが大切です。ちゃんと動いているかどうかを確認するために、センサーテストは欠かせません。キュートは、センサーが正しく機能しているかどうかをチェックできるように、センサーテストをコマンドで打てるように設計しました。
センサー担当としては、何を測るか、どう測るかに加えて、どうキャリブレーションするか、どうデータ処理するか、ということを常に考えなければならなかったところが、大変でしたね。
● キャリブレーションと忍耐
キャリブレーションは日本語だと較正といいます。温度−サーミスタ出力電圧の関係、角速度−ジャイロ出力電圧の関係を正確に確認することです。例えば、20℃のとき何Vなのか、50deg/sのとき何Vなのか、ということを確認することです。これは、気が遠くなるくらいやりました。おかげで、忍耐力がついたと思います。
また、姿勢制御のためのジャイロがありますが、その温度ドリフトというのを調べないといけないので、恒温槽で試験しました。これがまた、忍耐力を養ってくれるような試験なんですよ。5度あげては、温度が安定になるまで、変化をずっと見ているんです。退屈だけど、見ていないと試験にならないので、見ているんですよね。また、うちの研究室にある恒温槽はあまり背が高くないので、それにちょうどぴったりはいるようなジグを作りました。自作です。こういうのを自分で作るのは、やはり予算との関係だと思います。業者さんに丸投げして、大事なところだけやる、ということができればいいのかもしれませんが、そんな余裕はないですからね。こういう泥臭い部分をどこまで学生がやればいいのか、考えどころだと思います。努力してもメーカーを超えられない部分と、努力とアイディアでメーカーを超えられる部分とあると思うんですよね。
それはともかく、温度を少しずつあげて試験をしたら、次は下げていくんです。このとき、ヒステリシス現象というのに気をつけないといけないんですが、このときは特にありませんでしたね。ヒステリシス現象ですか?上昇時と下降時とで変化のしかたが変わるという現象です。イメージとしては、バネが伸びるとたるんで同じようには戻らないという感じを想像してもらえばいいかもしれません。
自分は、このプロジェクトに関して、センサーのことでいろいろ言われると、素直に変更に応じていましたが、それが、その後、解析が難しくなって、苦労する原因になりました。何がいけなかったか、ですか?一言でいうと、「想像力」が足りなかったんだと思います。たぶん、もっともっと開発の経験を積んでいれば、「こうすればああなる」という想像が瞬時に働くようになるのだと思いますが、自分の場合は、それがまだまだ足りなかったように思います。